
Назначение:
Блок создает динамический объект, описываемый уравнениями в пространстве состояний:
x& = A⋅ x + B⋅u y = C ⋅ x + D⋅u
где x – вектор состояния, u – вектор входных воздействий,
y – вектор выходных сигналов,
A, B, C, D - матрицы: системы, входа, выхода и обхода, соответственно.
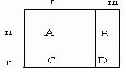
Размерность матриц показана на рисунке 9.3.12 (n – количество переменных состояния, m – число вход
Параметры:
A –Матрица системы.
B – Матрица входа.
C – Матрица выхода
D – Матрица обхода
Initial condition – Вектор начальных условий.
Absolute tolerance — Абсолютная погрешность.
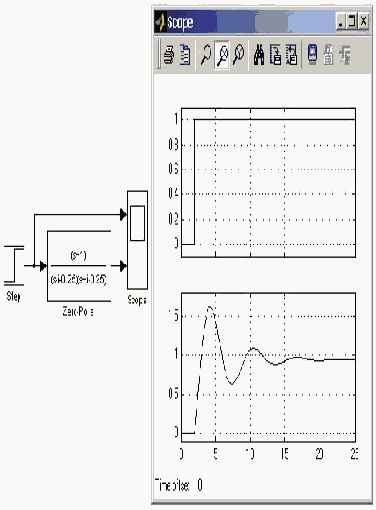
На рисунке 9.3. 13 показан пример моделирования динамического объекта с помощью блока State-Space.