
Применение искусственных нейронных сетей в системах управления
Соответствующие фотоприемники (фотодиоды, фототранзисторы) в каждом чипе в 3D-HC преобразуют оптические сигналы от чипа к чипу в электрические и служат конечными элементами оптических соединений и ЛС. В 3D-HC оптические параметры миниатюрных фотоприемников (спектральная характеристика чувствительности, апертура, площадь све-44
точувствительной площадки и др.) согласуются с оптическим каналом лазерных диодов, а электрические характеристики - с характеристиками последующих логических элементов КМОП, а также БИКМОП, КБИ/КБИКМОП схем.
Наиболее перспективной с точки зрения снижения потребляемой мощности и увеличения интеграции 3D-HC представляется организация оптических связей с внешней модуляцией периферийных источников света -лазерных диодов, что приводит к практическому исключению рассеиваемой мощности лазеров на периферии чипов (эквивалентов выходных усилителей мощности в стандартных электронных БИС) и соответственно к существенному ослаблению проблем, связанных с нагрузочной способностью выходов оптомикроэлектронных УБИС.
Если в архитектурах 3D-HC и НК удастся не только уменьшить площади периферийных лазеров, но и их число, то это приведет к значительному улучшению технико-экономических характеристик системы, в первую очередь, по снижению потребляемой мощности, уровню интеграции, а также системному быстродействию. По мере дальнейшего технологического прогресса масштабирования микроэлектронных и оптомикроэлектронных компонент и улучшения их характеристик в 3D-HC можно ожидать наиболее полной реализации преимуществ оптоэлектроники для передачи информации между нейрочипами и нейропластинами в НК.
Перспективным материалом для оптоэлектронных технологий НК и НС является наноструктуированный пористый кремний. Использование которого, благодаря его принципиальной совместимости со стандартной кремниевой технологией, позволяет повысить надежность производимых нейрочипов.
Еще одним направлением реализации нейросетсвых структур является создание устройств биокомпьютинга. Качество и производительность устройств и систем биокомпьютинга, использующих химические реакции типа Белоусова-Жаботинского, ферментативные реакции с нелинейной кинетикой, сред сопряженных химических и биохимических реакций обеспечиваются не повышенным быстродействием исходных элементов, а динамикой и самоорганизацией биосистем и определяющимися ими информационными процессами.
Перспективным также является симбиоз методов и средств биокомпьютинга и микро- и оптоэлсктронных принципов обработки информации на основе нейрочипов, 2D- и 3D-HC. Элементно-технологическим базисом таких симбиозных систем могут быть двумерные и трехмерные кремниевые пластины максимального диаметра, на которых будут размещаться как традиционные кремниевые чипы и нейрочипы, так и интеллектуальные биочипы предельной вычислительной сложности.
От успеха разработки, производства и эффективного внедрения систем нейрокомпыотинга, а также биокомпьютинга и симбиозных систем бионейрокомпьютинга с поистине, неограниченными потенциальными вычислительными и логическими возможностями зависит решение жизненно важных для цивилизации и невероятно сложных для современной вычислительной техники задач.
Глава 2. Применение искусственных нейронных сетей в системах управления
2.1. Особенности использования искусственных нейронных сетей в системах управления
В историческом плане можно утверждать, что разработка систем управления (СУ) всегда происходит поэтапно. В качестве таких этапов можно выделить:
этап разработки концепции построения СУ;
этап моделирования СУ, в соответствии с предлагаемой концепцией построения;
этап анализа получаемых результатов;
этап доработки (модернизации) концепции построения СУ.
На протяжении всех этих этапов не прекращаются теоретические исследования, которые позволяют выбирать основные направления совершенствования первоначально сформулированной концепции построения СУ и распространять ее основные идеи на ряд смежных областей.
По аналогичной схеме происходит развитие СУ, использующих искусственные НС. Однако следует заметить, что большое количество разработанных аппаратных и программных моделей нсйросетевых СУ часто опережают теоретическое понимание происходящих при этом процессов и имеющихся проблем [93].
Необходимым этапом решения задач управления нелинейными динамическими системами является получение их адекватных математических моделей, базирующееся, как правило, на теоретическом и экспериментальном анализе свойств этих систем. Теоретический анализ процессов, происходящих в системе, позволяет получить математическое описание в виде, например, дифференциальных уравнений. При экспериментальном анализе на основе наблюдений входных и выходных сигналов системы получают либо се параметрическую, либо непараметрическую модель.
Наиболее широкое распространение получили параметрические модели, требующие решения задач структурной и параметрической идентификации и использующие ограниченное число параметров. Несмотря на огромное количество работ, многообразие видов нелинейностей не позволяет создать единую теорию идентификации нелинейных систем. Применяемый чаще всего классический подход основан на аппроксимации нелинейностей, например рядами Вольтера, Гаммерштейна, Винера, полиномами Колмогорова-Габора и др.
Однако область применения таких моделей ограничена. Кроме того, дополнительные трудности получения адекватного математического описания обуславлено наличием в реальных сигналах помех.
Одной из классических моделей СУ является модель с обратной связью с регулируемыми в реальном масштабе времени коэффициентами, например самонастраивающийся регулятор Астрома [43]. Коэффициенты такого контроллера регулируются в течении каждого цикла управления в соответствии с оценкой параметров системы.
Блок-схема управления с обратной связью и регулируемыми в реальном масштабе времени коэффициентами приведена на рис. 2.1.
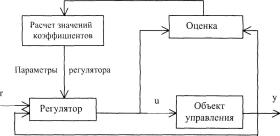
Рис. 2.1. Блок-схема управления с обратной связью и регулируемыми коэффициентами
Другой хорошо известной моделью СУ является модель Ляпунова. Системы адаптивного управления, использующие эталонную модель Ляпунова проектируются таким образом, чтобы выходной сигнал управляемой модели в конце концов соответствовал выходному сигналу предварительно определенной модели, которая имеет желаемые характеристики [96]. Такая система должна быть асимптотически устойчивой, то есть управляемая система в итоге отслеживает эталонную модель с нулевой ошибкой. Более того, переходные процессы на этапе адаптивного управления или обучающего управления имеют гарантированные пределы.
Блок-схема адаптивного управления с эталонной моделью представлена на рис. 2.2.
Системы управления, так или иначе использующие искусственные НС являются одной из возможных альтернатив классическим методам управления. Возможность использования НС для решения задач управления во многом основывается на том, что НС, состоящая из двух слоев и имеющая в скрытом слое произвольное большое количество узлов, может аппроксимировать любую функцию действительных чисел с заданной степенью точности.
Доказательство этого положения, основанное на известной теореме Вейерштрасса, приведено в [79]. Таким образом, для решения задач идентификации и управления могут быть использованы НС даже с одним скрытым слоем. Одним из первых используемых методов построения нейросетевых СУ был метод, основанный на "копированиии" существующего контроллера. Применив этот метод в 1964 Уидроу назвал его методом построения экспертной системы за счет получения знаний от уже существующего эксперта. Архитектура такой СУ представлена на рис.
2.3.

Рис. 2.3. Нейросетевая СУ, основанная на "копировании" существующего
контроллера
Глядя на этот рисунок можно усомниться в полезности этого метода. Зачем нужно использовать еще один управляющий контроллер (в виде НС), если один уже существует?
Однако, во-первых, существующий контроллер может быть неудобен при использовании (например, в роли такого контроллера может выступать человек), а во-вторых, для выработки эффективного управления НС может использовать отличную, от существующего контроллера, по способу представления (легче измерить, формализовать и т. д.) информацию о состоянии объекта управления.
В настоящее время достаточно хорошо разработан и широко используется целый ряд других возможных архитектур построения нейросетевых СУ [73, 93]. Во всех из них, назначением нейросетевого контроллера является выработка адекватного управляющего сигнала для управления динамикой состояний объекта управления от начального состояния до желаемого итогового состояния. Причем смена состояний должна происходить по оптимальной траектории.
Организация контроля за состоянием объекта управления и реализация нейросетевого контроллера в значительной степени зависят от выбранного алгоритма обучения и используемой структуры управления. Наиболее широко используемыми являются схема прямого (непосредственного) управления и схема косвенного управления.
При этом чаще всего в качестве алгоритма обучения используется алгоритм обратного распространения ошибки [73].
В схеме косвенного управления параметры объекта управления определяются в каждый момент времени и затем используются для оценки параметров контроллера (см. рис. 2.4).
Таким образом, имеет место явно выраженный процесс идентификации.
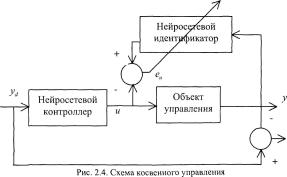
Недостатком такой схемы является то, что идентификация и управление основываются исключительно на ошибке еи, и, следовательно, минимизацию ошибки на выходе системы еу гарантировать нельзя.
В схеме прямого управления параметры нейросетевого контроллера регулируются таким образом, чтобы уменьшить непосредственно ошибку выхода е? (см. рис.
2.5).

В качестве целевёёёой функции, которая должна быть минимизирована контроллером используется среднеквадратическая ошибка на выходе объекта управления
Еу=\(У,~У)2- (2.1)
Вопросы устойчивости и управляемости таких СУ подробно рассматриваются в работах [32, 70, 73, 78, 92, 93, 108].
Одной из областей теоретических исследований, рассматривающих проблемы использования НС в системах управления, является сравнение таких методов управления с другими известными типами СУ, выявление присущих нейросетевым методам особенностей и их анализ. В работе [93] дан краткий обзор характеристик упомянутых выше СУ. Сравнивались устойчивость, скорость сходимости, работа в условиях шумов, требуемый объем памяти и др.
Хотя каждый из рассмотренных методов имеет как хорошие, так и плохие характеристики следует заметить, что метод нейросетевого управления имеет такие полезные свойства, которые плохо реализуются в двух других методах.
Основные результаты, полученные при сравнении, приведены в табл. 2.1.
Таблица I
| Обзор характеристик методов управления | ||||||||||||||||||||||||||||||||
|
Таким образом, напрашивается следующий вывод. Будущее интеллектуального управления лежит в сочетании традиционного управления с потенциальными возможностями и перспективами использования систем, основанных на использовании искусственных НС.
Модель 1: выход неизвестного нелинейного объекта управления зависит линейно от его предыдущих значений и нелинейно от предыдущих значений входа. Модель 1 показана на рис. 2.6 и состоит из секционированных линий задержки на входе и в цепи обратной связи.
Модель 2: может быть реализована как показано в рис. 2.7. В этом случае выход зависит линейно от входа и(к) и его предыдущих значений и нелинейно от собственных предыдущих значений.
Модель 3: из нелинейного разностного уравнения (2.5) видно, что выход нелинейного объекта управления зависит нелинейно как от предыдущих значений входа, так и от предыдущих значений выхода. Схематичное представление нелинейного разностного уравнения для модели 3 приведено на рис. 2.8.
Модель 4: эта наиболее общая из всех моделей, представленных ранее. Выход в любой момент времени является нелинейной функцией предыдущих значений и входа и выхода. Она изображена на рис. 2.9.
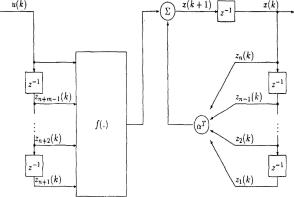
Рис.2.6. Модель 1
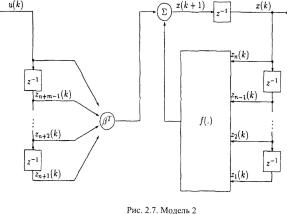
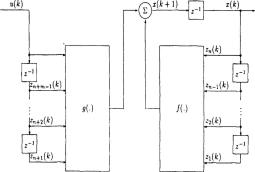
Рис. 2.8. Модель 3
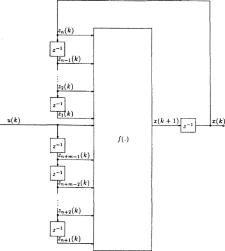
Рис. 2.9. Модель 4
Из (2.3)-(2.6) и рис. 2.6-2.9 следует, что модели идентификации объектов управления в общем случае должны состоять из нейросетевых моделей и секционированных линий задержки.
При этом используемая НС должна содержать достаточное для соответствующего нелинейного отображения состояния объекта управления число слоев и узлов в каждом слое. С точки зрения математики это подразумевает, что нелинейные функции в разностных уравнениях, описывающих состояние объекта управления могут быть заменены нейросетевыми моделями с фиксированными матрицами весовых коэффициентов W..
Чтобы правильно идентифицировать состояние объекта управления и на основе этого формировать соответствующее управляющее воздействие модель идентификации должна выбираться на основе имеющейся информации относительно класса, которому принадлежит рассматриваемый объект.
При построении контроллера для управления р-настойчивым множественным доступом могут использоваться типовые варианты реализации управляющих контроллеров, содержащих нейросетевые модели описанные в [73]. Нейронная сеть будет являться одной из основных компонент системы управления. При этом НС используется в виде либо параллельной, либо последовательно-параллельной (рис.
2.10) модели. Настройка весов НС (обучение НС), может рассматриваться как процесс ее адаптации к выбранной системе управления.
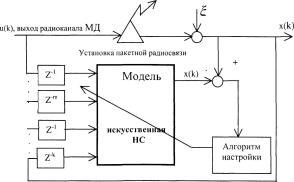
Рис. 2.10. Обобщенная модель управления р-настойчивым множественным
доступом
Вариант использования многослойной НС для решения задачи децентрализованного управления р-настойчивым МД представлен на рис. 2.11.
Слева схематично изображен частотно-временной план тактированного радиоканала случайного МД. Предполагается, что возможно наличие трех событий: Конфликт, Успех, Свободно (пустое временное окно).
Справа схематично изображена q -слойная НС с Я, нейронами в і -м слое.
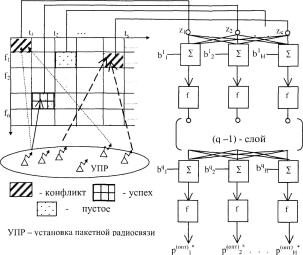
Рис.2.11. Вариант использования НС для решении задачи управления МД Математическая модель такой сети имеет вид:
Наиболее часто используется модель искусственной НС, содержащая помимо входного и выходного слоев, один скрытый слой. Кроме того, для простоты принимается, что все функции активации имеют одинаковый вид. Для того случая уравнение (2.7) принимает вид
х( + 1) = (w3 У/[(??2 / /[(и’1 J л(А')|; (2.9)
где z(k) = [х(/г),х,...,х(А; - т +1 );и(к),...,и(к - т +1)] 7.
Такая нейросетевая модель и была использована при компьютерном моделировании.
Для обучения многослойных НС может быть использовано несколько процедур, оптимизирующих некоторую функцию критерия с помощью градиентных методов первого и второго порядков, а также с помощью методов линеаризации (см. п. 1.2.2). Обучающее множество должно быть представительным, что гарантирует правильную работу системы идентификации даже в случае поступления на ее вход набора, не включенного в обучающее множество.
При моделировании среднеквадратическая ошибка
с s
Е = у- XX(7?(om)'r - ри,,т)н )2 рассчитывалась при использовании про-
-1 ,?=І
цедуры обратного распространения. Здесь через С обозначается число выборок образов в обучающем множестве, а через р(опт)с* ={р(0ПТ)ІС*,
(ОПТ) * П(0ПТ) *\Е и n(0ln) - /г(0ПТ) п(0пт) „(опт) \Т
Р 2с ¦ - ч Р Нс 1 и р с (р 1с,р 2с?* * * 1 Р Нс/ соответственно получаемый и желаемый выходные векторы сети. Для расчета желаемого выходного вектора сети, используемого для обучения может использоваться, в частности, аналитическая модель, предлагаемая в [18, 62].
Результаты моделирования показали, что использование НС для управления p-множественным доступом позволяет получать оптимальные значения вероятности повторной передачи в соответствии с выбранной стратегией при неизвестных ранее входных данных. Причем после завершения процесса обучения не требуется производить дополнительных вычислений, и процесс принятия решения ускоряется.
Глава 3. Применение нейронных сетей в телекоммуникационных системах
3.1. Основные Направления применения искусственных нейронных сетей в телекоммуникационных системах
Длительное время считалось, что нейрокомпьютеры эффективны и применимы лишь для решения так называемых пеформализуемых и плохо формализуемых задач, связанных с необходимостью включения в алгоритм их решения данных обучения на реальном экспериментальном материале. В первую очередь к таким задачам относятся задачи распознавания образов.
В последнее время область применения нейроинформационных технологий динамично расширяется [19]. Они все шире и шире используются в задачах с ярко выраженным естественным параллелизмом: обработка сигналов, изображений и т. п.
Среди основных выделяют четыре области применения нейрокомпьютеров в системах связи [9]: управление коммутацией; маршрутизация; управление трафиком;
распределение каналов в подвижных системах радиосвязи.
Решение практически любой задачи в нейросетевом логическом базисе предполагает наличие следующих этапов [12]:
формирование входного и выходного сигналов НС; формирование желаемого выходного сигнала НС; формирование сигнала ошибки и функционала оптимизации; формирование структуры НС, адекватной выбранной задачи; разработка алгоритма настройки НС, эквивалентного процессу решения задачи в нейросетевом логическом базисе;
проведение исследований процесса решения задачи.
Метод обучения и нейронная сеть, используемая для управления работой высокоскоростной коммутационной сети с пакетной передачей в асинхронном режиме, описаны в работе [44]. Сеть используется для управления коммутацией пакетов при передаче речи, изображений и данных.
Коммутатор представлен как логическое устройство, на вход которого поступает N сигналов и которое на выходе воспроизводит эти сигналы в любом представленном порядке.
В работе [48] рассматривается пространственный коммутатор (входы н выходы коммутатора являются различными физическими линиями). Приводятся примеры формирования структуры НС для управления процессом коммутации в различных телекоммуникационных системах.
В настоящее время число связей, эмулируемых в нейрокомпьютере, может достигать нескольких сот миллионов. Поэтому становится возможным построение коммутаторов с нейросстевым управлением на несколько сот каналов [9].
В работе [49] рассматривается многоступенчатая коммутационная схема Баньяна и ее управление с помощью нейроконтроллера. Подробнее об управлении коммутацией с использованием искусственных НС можно ознакомиться в [9, 103] и других работах.