
Модели и методы оптимизации структуры управляющей компании
(17) W-1(1) - W(W‘-1(1)) ® min .
W QeM'
Величина
(18) (УК ) min W-1(1) - W(W-1(1)) -
iKi W(-^M’
- min У Vi [W:-1(1) - Wi(W;-1(1))]
{Wi (¦ )GM'}tei ?
характеризует потери УК от использования унифицированной шкалы и может рассматриваться как косвенная оценка минимального снижения информационной нагрузки на УК, при которой переход от персонифицированным шакалам к унифицированной целесообразен.
Отметим, что результаты решения статических задач (16) и
(17) могут использоваться для постановки и решения задач оптимизации шкал с учетом динамики и последовательности выполнения корпоративных проектов (см. второй раздел).
Оперативное управление. В заключение настоящего раздела рассмотрим модель оперативного управления, отражающую тот случай, когда в ходе реализации проекта или программы выясняется, что фактические значения существенных параметров отличаются от прогнозируемых, или фактические значения показателей реализации проекта - от планируемых.
Пусть в ходе реализации проекта в момент времени to К/у обнаружилось, что объем работ по проекту был оценен неправильно, и составляет он V0 V, а не К, как считалось ранее.
Первоначально риск УК составлял, в соответствии с утверждением 8 5 = V [W-1(1) - W(W-1(1))], теперь же, в случае сохранения принятого графика финансирования он станет равным
(19) 5o = Vo [W'~I(1) - W(W1-1 (1))],
то есть, вырастет пропорционально росту объема работ по проекту.
Если УК перезаключает договор с АЭ, выбирая в качестве новой точки отсчета выполненный к моменту времени t0 объем работ у to, а в качестве объема работ по новому договору - (V0 -у to), то получим новую оценку риска УК:
(20) S* = max [у to + у t- Vo W(y to/ Vo + у t / Vo)].
te[Q;V0/ у-^]
Вычисляя максимум в (20) получаем, что S = S’. Таким образом, доказано следующее утверждение.
Утверждение 9. Перезаключение договора без изменения шкалы оплаты не снижает риска УК.
Содержательно утверждение 9 означает, что при перезаключении договора в процессе оперативного управления корпоративной программой необходимо учитывать изменившиеся условия и решать задачу синтеза новой шкалы (см. выше), то есть шкалы, оптимальной в данных условиях.
Модели и методы оптимизации структуры управляющей компании
В первом разделе решены задачи согласования интересов элементов системы управления корпоративными программами, а также задача выбора управляющей компании. Во втором разделе -задачи планирования (выбора вариантов реализации корпоративных проектов), в третьем - задачи оперативного управления процессом реализации корпоративных проектов и программ.
В настоящем разделе рассматриваются две модели формирования и оптимизации структуры управляющей компании. Первая модель основывается на решении задач назначения - определения распределения активных элементов по работам проектов, вторая - на результатах исследования активных систем с распределенным контролем, приведенных в первом разделе и в [23, 25, 43, 46].
Для большинства современных организаций и фирм (не только для компаний, управляющих реализацией корпоративных программ) актуальна проблема поиска рационального баланса между функциональной и проектной структурой. Линейная структура, порождаемая функциональной специализацией, оказывается эффективной при процессном функционировании, то есть в условиях относительного постоянства набора реализуемых системой функций.
При проектной структуре участники системы привязаны не к функциям, а к проектам, которые могут сменять друг друга во времени (см. подробное обсуждение свойств линейных, матричных и сетевых структур в [19, 40]). Гибридом функциональной и проектной структур является матричная структура, в которой каждый исполнитель в общем случае подчинен одновременно нескольким руководителям - например, некоторому функциональному руководителю и руководителю определенного проекта.
Поэтому ниже рассматриваются модели, учитывающие плюсы и минусы различных структур и позволяющие определять оптимальные (по оговариваемому в каждом конкретном случае критерию) типы структур. Отметим, что речь идет именно о типе структуры, так как задача синтеза оптимальной иерархической структуры в целом не рассматривается (см. соответствующие модели в [19, 28, 38, 40, 59]) - исследование ограничивается анализом простейших двухуровневых блоков.
Модель назначения. Пусть в системе имеются п АЭ - исполнителей работ по корпоративным проектам (I = {1, 2, п} -множество АЭ) и т ? п центров, каждому из которых поставлен в соответствие некоторый тип работ.
Тогда проект (выбираемый за единицу времени) может характеризоваться вектором v = (v1, v2, vm) объемов работ, где ?- 0, j е M- множеству работ (центров).
Введем матрицу \\уі]-\\і е і j е M, элемент уі}- 0 которой отражает объем работ j-го типа, выполняемый i-ым АЭ. Обозначим уі = (Уіь ¦¦¦, Уіт) е Жm - вектор объемов работ, выполняемых i-ым АЭ, і е I, у = (у1, ут) е Жтп - вектор распределения работ по АЭ.
Если ci(y): Жт п ® Ж+1 - функция затрат і-го АЭ, то задача распределения работ может быть сформулирована в виде:
(1) Е С(У) ® mi^
іЕІ У
(2) Е уj = V’jе M.
іЕІ
Отметим, что в задаче (1)-(2) не учитываются ограничения на объемы работ, выполняемые АЭ.
Если функции затрат выпуклые по соответствующим переменным, то (1)-(2) - задача выпуклого программирования. Оптимальное значение целевой функции (1) обозначим C0(v).
Например, если X С (У) = X X УІ /2^ , то ytJ = rtJ Vj / j где
iGl іеі jGM
r = X rv, І e I, j e M, и C0(v) = X vj Hr] .
ІЕІ jGM
Содержательно задача (1)-(2) соответствует определению структуры взаимосвязей между АЭ и центрами (напомним, что каждый центр отвечает за некоторую работу). В общем случае каждый АЭ оказывается связан с каждым центром, так как первый выполняет в оптимальном распределении работ работы нескольких (быть может, даже всех) типов.
Можно условно считать, что подобным связям соответствует матричная структура управления (описываемая матрицей | \yij\\г e I: j eM, являющейся решением задачи (1)-(2) и называемой иногда матрицей ответственности), эффективность которой зависит от рассматриваемого проекта v и равна C0(v). Поэтому задачу (1)-(2) можно условно назвать задачей синтеза оптимальной матричной структуры.
Альтернативой является использование функциональной структуры, в которой каждый АЭ закреплен за одним и только одним центром (типом работ). Для того, чтобы найти оптимальную функциональную структуру, следует решить задачу назначения исполнителей.
Сформулируем эту задачу.
Пусть функции затрат АЭ сепарабельны:
(3) Сг(у) = X Cj (Ущ ).
jGM
Тогда задача поиска оптимальной функциональной структуры заключается в нахождении такого разбиения S множества АЭ I на m непустых подмножеств S = {Sj} e M (между элементами которых работа соответствующего типа распределяется по аналогии с задачей (1)-(2)), что суммарные затраты по выполнению всего объема работ в рассматриваемом проекте минимальны.
Задача распределения объемов j-ой работы между элементами множества Sj сI имеет вид:
(4) X сj (Уіj) ^ min,
iGSj ysj
(5) Е Уц=v
IgSj
где yS. - вектор действий АЭ из множества Sj, j е M.
Обозначим Cj(Sj, vj) - оптимальное значение целевой функции (4). Тогда задача синтеза функциональной структуры заключается в нахождении разбиения S минимизирующего сумму затрат, полученных из решения задач (4)-(5) для всех j е M:
(6) Е Cj(Sj , vj) ® mjn.
jEM S
Обозначим C(v) - оптимальное значение целевой функции в задаче (6).
Утверждение 10. v C(v) C0(v).
Доказательство утверждения 10. При сепарабельных функциях
затрат аэ Е cj (Sj , vj) = Е Е су(Уц) = Е с(y), то есть
jEM jEM iESj іеі
целевые функции (1) и (6) (с учетом (4)) в задачах синтеза оптимальной матричной и функциональной структур совпадают. В последней задаче допустимое множество не шире, следовательно, и значение целевой функции не меньше.
Утверждение 10 доказано.
Эффективности C(v) и C0(v), соответственно, функциональной и матричной структур являются косвенными оценками максимальных дополнительных затрат на управление, возникающих при переходе от линейной (функциональной) к матричной структуре управления. Поясним последнее утверждение. Функциональная структура, как известно [19, 40, 47, 48], требует минимальных затрат на управление (собственное функционирование). Но, она приводит к неэффективному распределению работ между АЭ - см. утверждение 10.
С другой стороны, матричная структура приводит к более эффективному распределению работ, но требует больших затрат на управление. Поэтому при решении вопроса о выборе структуры (или переходе от одной структуры к другой) следует принимать во внимание оба фактора: затраты на управление и эффективность распределения работ (эффективность структуры).
Если последняя может быть оценена количественно (см. задачи (1)-(2) и (4)-(6)), то определение затрат на управление является сложной задачей, решаемой на практике, зачастую, интуитивно.
Исходя из этого, можно сказать, что если затраты на управление при использовании матричной структуры превышают затраты на управление при использовании линейной структуры не более, чем на C(v) - C0(v), то предпочтительно использование матричной структуры, в противном случае - линейной.
Кроме того, во многих реальных организациях одна подструктура является матричной, а другая - линейной. Определение рационального баланса (между ними двумя одновременно) может производиться по аналогии с формулировкой и решением задачи (4)46).
Если задача (4)-(5) является стандартной задачей математического программирования, то задача (6) принадлежит к задачам дискретной оптимизации. Решение ее в случае больших значений m и n может оказаться чрезвычайно трудоемким.
Поэтому для того, чтобы сделать хоть какие-то качественные выводы, введем ряд упрощающих предположений.
Рассмотрим частный случай, когда число АЭ равно числу работ, затраты АЭ сепарабельны и удельные затраты cij i-го АЭ по выполнению j-ой работы постоянны, i е I, j е M.
Тогда элементы разбиения S - одноэлементные множества и задача (1)-(2) принимает вид:
(7) 1U ® m in
isI JeJ {У?-U}
(8) E yj = vpjе M
isI а задача (4)-(6) превращается в следующую стандартную задачу о назначении:
min
{yij e{U;1}}
(9) EEWjX ®
isI jeJ (1U) E Xj = 1,j е M,
isI (11) E Xj = 1, i е I.
JsM
В силу линейности целевой функции (7), решение задачи (7)-(8) тривиально: yij = vj, если i = arg min cj, и yij = 0, если i Ф arg min cj, i е I, то есть следует поручать весь объем работ j-го
isI
типа поручать тому АЭ, который выполняет его с наименьшими удельными затратами. При этом может оказаться, что все работы выполняет один АЭ.
Это распределение работ будет оптимально по критерию суммарных затрат, но может быть нереализуемым на практике.
Для того чтобы уйти от тривиального (и иногда нереализуемого) решения, введем ограничения Yi на максимальный суммарный объем работ, которые может выполнять і-ый АЭ, і е I.
С этими ограничениями задача (7)-(8) превращается в следующую стандартную транспортную задачу:
{Уц 0}
(12) XX сцУц ® min
ieI jeJ (13) X Уц = VJ’j е M
ІЕІ (14) X Уц ? Y, і е I,
jeM
которая разрешима при условии XYi X ?ц .
Задачи назначения (1)-(2), (4)-(6), (7)-(8), (9)-(11) и (12)-(14) формулировались для случая одного проекта. Аналогично ставятся и решаются задачи синтеза оптимальных (матричных и линейных) структур и для случая, когда система реализует последовательно набор проектов с заданными характеристиками (или характеристиками, относительно которых имеется статистическая информация).
Матричной структуре при этом соответствуют изменяющиеся во времени (в зависимости от реализуемого проекта) распределения работ по АЭ (с этой точки зрения матричная структура управления, определяемая в результате решения задач назначения на каждом шаге, близка к сетевой структуре [40]), линейной - постоянное закрепление АЭ за определенными центрами (типами работ). Эффективность той или иной структуры в динамике может оцениваться как сумма (или математическое ожидание, если характеристики потока достоверно неизвестны) затрат на реализацию всего набора проектов за рассматриваемый период времени.
Вывод утверждения 10 о том, что матричная структура характеризуется не большими суммарными затратами АЭ, чем линейная, в динамике также остается в силе.
Приведем пример. Пусть имеются два типа работ и два АЭ,
удельные затраты которых представлены матрицей
чения объемов работ АЭ: Y1 = Y2 = 1, рассматривался поток из 60 проектов объемами (vb v2), которые равномерно распределены на v1 + v2 ? 2. Численное моделирование заключалось в нахождении для каждого проекта:
- затрат с1 (решение задачи (9)-(11)) при назначении
один из вариантов постоянной (не изменяющейся во времени) линейной структуры;
- затрат с2 (решение задачи (9)-(11)) при назначении
один из вариантов постоянной (не изменяющейся во времени) линейной структуры;
- затрат с - оптимальное решение задачи (9)-(11) - оптимальная на каждом шаге линейная структура без ограничений на индивидуальные объемы работ АЭ;
- затрат с00 - оптимальное решение задачи (7)-(8) - оптимальная на каждом шаге матричная структура без ограничений на индивидуальные объемы работ АЭ;
- затрат с0 - оптимальное решение задачи (12)-(14) - оптимальная на каждом шаге матричная структура c ограничениями на индивидуальные объемы работ АЭ.
Средние (по всем 60 проектам) значения затрат приведены в таблице 1.
| Табл. 1. Средние затраты | ||||||||||
|
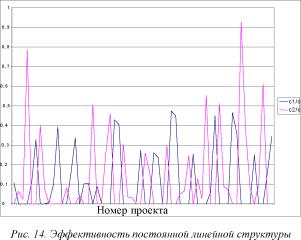
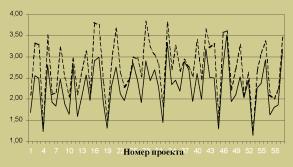
На рисунке 15 приведены графики затрат c - оптимального решения задачи (9)-(11) - прерывистая линия - и c00 - оптимального решения задачи (7)-(8) - непрерывная линия, которые позволяют оценить потери в эффективности от использования линейной структуры по сравнению с матричной (см. также утверждение 10).
Таким образом, постановка и решение задач назначения позволяет оценивать сравнительную эффективность различных структур и закономерностей их трансформации, осуществлять выбор оптимальной или рациональной структуры управляющей компании в зависимости от набора проектов, реализуемых в рамках корпоративной программы.
Модель распределенного контроля. Результаты анализа систем с распределенным контролем, в которых один и тот же активный элемент одновременно подчинен нескольким центрам, свидетельствуют, что существуют два режима взаимодействия центров -режим сотрудничества и режим конкуренции (см. первый раздел).
В режиме конкуренции управление АЭ осуществляется одним центром, который определяется по результатам анализа аукционного равновесия игры центров. Такая ситуация соответствует линейной (веерной) структуре управления.
Условием реализации режима сотрудничества (и, следовательно, матричной структуры) является непустота области компромисса. Для непустоты области компромисса, в свою очередь, необходимо и достаточно, чтобы максимальное (по действиям АЭ) значение суммы целевых функции всех участников системы (всех центров и АЭ) было не меньше, чем сумма максимумов значений целевых функций центров, каждый из которых вычисляется в предположении, что он осуществляет единоличное управление АЭ.
Если целевые функции и допустимые множества участников системы зависят от некоторых параметров, то можно исследовать зависимость структуры системы от этих параметров - при тех комбинациях параметров, при которых имеет место вышеупомянутое условие следует реализовывать матричную структуру, при остальных значениях параметров - линейную структуру. Если известна стоимость изменения этих параметров, то можно ставить решать задачу развития (оптимального изменения параметров с учетом затрат на изменения и эффективности структур) по аналогии с тем, как это делается в [2].
Рассмотрим пример, иллюстрирующий применение описанного общего подхода. Рассмотрим систему, состоящую их одного АЭ и двух центров. Стратегией АЭ является выбор действия у е [0; 1], содержательно интерпретируемого как доля всего рабочего времени АЭ, отрабатываемого на первый центр. Соответственно, (1 - у) характеризует долю времени, отрабатываемого на второй центр. Центры получают доходы, зависящие от того времени, которое на них отработал АЭ: H1(y) = у, H2(y) = Ь У, где Ь 2 0 - некоторый параметр. АЭ несет затраты c(y) = а у2 / 2 + (1 - У)2 / 2.
Определим наиболее выгодное для первого центра действие АЭ (максимизирующее разность между H1(y) и c(y)):
* Г1, а 1
Уі
0, а 1
Определим наиболее выгодное для второго центра действие АЭ (максимизирующее разность между H2(y) и c(y)):
b1, а 1, b 1 а -1
0, а 1, Ь ? 1. 1, а ? 1
Вычисляем соответствующие значения целевых функций центров:
- в области а ? 1 центры получают (управляя АЭ поодиночке) следующие полезности: W1 = 1 - а / 2, W2 = Ь -а /2;
- в области а 1, b 21 центры получают (управляя АЭ поодиночке) следующие полезности: Wj = -1 / 2,
W2 = [6 аЬ - (1 + а) Ь2 - 2 Ь - 3 а + 2 ] / 2 (а- 1)2;
- в области а 1, Ь 1 центры получают (управляя АЭ поодиночке) следующие полезности: Wj = -1 / 2, W2 = -1 / 2.
Определим действие y0, доставляющее
максимум
[H1(y) + H2y) - c(y)]: yo = min [b / (1 + a); 1], и
2(a +1)
1 + b - a/2, b ^ 1 + a
' b (4 + b) - (a +1) Wo = [Hi(yo) + H2(yo) - c(yo)] = i
Условие непустоты области компромисса (и реализуемости матричной структуры) имеет вид:
(15) W1 + W2 ? W0.
Так как каждая из величин W1t W2 и Wo зависит от параметров (a; b), то можно найти множество значений этих параметров, при которых условие (15) выполнено. Для рассматриваемого примера на рисунке 16 заштриховано множество значений параметров a и b, при которых оптимальной является матричная структура. В незаштрихованных областях оптимальна линейная структура, причем в равновесии АЭ оказывается починенным всегда только второму центру.

оптимальности различных структур при наличии прогноза изменений существенных параметров позволяет априори синтезировать структуру управляющей компании, обладающую максимальной (или максимальной ожидаемой, или допустимой и т.д. - в зависимости от решаемой задачи) эффективностью.
Литература ко второй части
1 Андронникова Н.Г., Баркалов С.А., Бурков В.Н., Котенко А.М. Модели и методы оптимизации региональных программ развития. М.: ИПУ РАН, 2001. - 60 с.
2 Балашов В.Г., Заложнев А.Ю., Иващенко А.А., Новиков Д.А. Механизмы управления организационными проектами. М.: ИПУ РАН, 2003. - 73 с.
3 Балашов В.Г. Модели и методы принятия выгодных финансовых решений. М.: Физматлит, 2003. - 408 с.
4 Балашов В.Г., Ильдеменов С.В., Ириков В.А., Леонтьев С.В., Тренев В.Н. Реформирование и реструктуризация предприятий.
М.: Издательство ПРИОР, 1998.
5 Баркалов С.А., Бурков В.Н., Гилязов Н.М. Методы агрегирования в управлении проектами. М.: ИПУ РАН, 1999. - 55 с.
6 Баркалов С. А., Новиков Д.А., Попов С. С. Индивидуальные стратегии предложения труда: теория и практика. М.: ИПУ РАН, 2002. - 109 с.
7 Беллман Р., Заде Л. Принятие решений в расплывчатых условиях / Вопросы анализа и процедуры принятия решений. М.: Мир, 1976.
С.172 - 215.
8 Белянкин Г.А., Борисов А.А., Васин А.А., Морозов В.В., Федоров В.В. Оптимальное распределение средств между инвестиционными проектами / Сборник Проблемы математической физики М.: Диалог МГУ, 1998.
С. 225.
9 Бурков В.Н., Горгидзе И.А., Ловецкий С.Е. Прикладные задачи теории графов. Тбилиси: Мецниереба, 1974. - 234 с.
10 Бурков В.Н., Данев Б., Еналеев А.К. и др. Большие системы: моделирование организационных механизмов. М.: Наука, 1989. -245 с.
11 Бурков В.Н., Дорохин В.В., Балашов В.Г. Механизмы согласования корпоративных интересов. М.: ИПУ РАН, 2003. - 73 с.
12 Бурков В.Н., Заложнев А.Ю., Новиков Д.А. Теория графов в управлении организационными системами. М.: Синтег, 2001. -124 с.
13 Бурков В.Н., Заложнев А.Ю., Леонтьев С.В., Новиков Д.А., Чернышев Р.А. Механизмы финансирования программ регионального развития. М.: ИПУ РАН, 2002. - 52 с.
14 Бурков В.Н., Квон О.Ф., Цитович Л.А. Модели и методы муль-типроектного управления. М.: ИПУ РАН, 1998. - 62 с.
15 Бурков В.Н., Новиков Д.А. Как управлять проектами. М.: Синтег, 1997. - 188 с.
16 Бурков В.Н., Новиков Д.А. Теория активных систем: состояние и перспективы. М.: Синтег, 1999. - 128 с.
17 Вагнер Г. Основы исследования операций. М.: Мир, 1972. Т. 1 - 3.
18 Васильев Д.К., Заложнев А.Ю., Новиков Д.А., Цветков А.В. Типовые решения в управлении проектами. М.: ИПУ РАН, 2003. -84 с.
19 Воронин А.А., Мишин С.П. Оптимальные иерархические структуры. М.: ИПУ РАН, 2003. - 214 с.
20 Воропаев В.И. Модели и методы календарного планирования в автоматизированных системах управления строительством. М.: Стройиздат, 1974. - 232 с.
21 Воропаев В.И. Управление проектами в России. М.: Аланс, 1995. - 225 с.
22 Гермейер Ю.Б. Игры с непротивоположными интересами. М.: Наука, 1976. - 327 с.
23 Гилев С.Е., Леонтев С.В., Новиков Д.А. Распределенные системы принятия решений в управлении региональным развитием. М.: ИПУ РАН, 2002. - 54 с.
24 Гламаздин Е.С. Оптимизационная задача распределения инвестиций / Дипломная работа.
М.: ВМиК МГУ, 2001.
25 Губко М.В., Караваев А.П. Матричные структуры управления // Автоматика и Телемеханика. 2001.
10. С. 132 - 146.
26 Губко М.В., Новиков Д.А. Теория игр в управлении организационными системами. М.: Синтег, 2002. - 148 с.
27 Губко М.В. Механизмы управления организационными системами с коалиционным взаимодействием участников. М.: ИПУ РАН, 2003. - 140 с.
28 Ириков В.А., Тренев В.Н. Распределенные системы принятия решений.
М.: Наука, 1999.
29 Колосова Е.В., Новиков Д.А., Цветков А.В. Методика освоенного объема в оперативном управлении проектами.
Москва, 2001.
- 156 с.
30 Косов Е.В., Попов Г.Х. Управление межотраслевыми научнотехническими программами.
М.: Экономика, 1972.
31 Леонтьев С.В. Модели и методы управления разработкой и реализацией программ регионального развития.
М.: Физматлит, 2002.
32 Либерзон В.И. Основы управления проектами. М.: Нефтяник, 1997. - 150 с.
33 Мазур И.И., Шапиро В.Д. и др. Реструктуризация предприятий и компаний.
М.: Высшая школа, 2000.
34 Масютин С.А. Механизмы корпоративного управления. М: Финстатинформ, 2002. - 236 с.
35 Мескон М., Альберт М., Хедоури Ф. Основы менеджмента. М.: Дело, 1998. - 800 с.
36 Мильнер Б.З. Теория организации. М.: ИНФРА-М, 2002. -480 с.
37 Мильнер Б.З. Организация программно-целевого управления.
М.: Экономика, 1987.
38 Новиков Д.А. Механизмы функционирования многоуровневых организационных систем.
М.: Фонд Проблемы управления, 1999.
- 150 с.
39 Новиков Д.А. Обобщенные решения задач стимулирования в активных системах. М.: ИПУ РАН, 1998. - 68 с.
40 Новиков Д.А. Сетевые структуры и организационные системы. М.: ИПУ РАН, 2003. - 108 с.
41 Новиков Д.А., Петраков С.Н. Курс теории активных систем. М.: Синтег, 1999. - 108 с.
42 Новиков Д.А., Смирнов И.М., Шохина Т.Е. Механизмы управления динамическими активными системами.
М.: ИПУ РАН, 2002.
- 124 с.
43 Новиков Д.А. Стимулирование в организационных системах. М.: Синтег, 2003. - 305 с.
44 Новиков Д.А. Стимулирование в социально-экономических системах (базовые математические модели). М.: ИПУ РАН, 1998. -216 с.
45 Новиков Д.А., Цветков А.В. Механизмы стимулирования в многоэлементных организационных системах.М.: Апостроф, 2000.
- 184 с.
46 Новиков Д.А., Цветков А.В. Механизмы функционирования организационных систем с распределенным контролем. М.: ИПУ РАН, 2001. - 118 с.
47 Обэр-Крие Дж. Управление предприятием.
М.: Прогресс, 1973.
- 304 с.
48 Овсиевич Б.Л. Модели формирования организационных структур. Ленинград: Наука, 1979. - 157 с.
49 Орловский С.А. Проблемы принятия решений при нечеткой исходной информации. М.: Наука, 1981. - 206 с.
50 Петраков С.Н. Механизмы планирования в активных системах: неманипулируемость и множества диктаторства. М.: ИПУ РАН, 2001. - 135 с.
51 Попов Э.В. Управление корпоративными знаниями // Новости искусственного интеллекта.
2000. 1.
52 Поспелов Г.С., Ириков В.А., Курилов А.Е. Процедуры и алгоритмы формирования комплексных программ. М.: Наука, 1985. -424 с.
53 Поспелов Г.С., Ириков В.А. Программно-целевое планирование и управление. М.: Советское радио, 1976. - 344 с.
54 Санталайнен Т. Управление по результатам. М.: Прогресс, 1988. - 320 с.
55 Трахтенгерц Э.А. Компьютерная поддержка переговоров при согласовании управленческих решений. М.: Синтег, 2003. - 284 с.
56 Управление проектами / Общая редакция - В.Д. Шапиро. С.-Пб.: ДваТрИ, 1996. - 610 с.
57 Управление проектами: справочное пособие / Под ред. И.И.
Мазура, В.Д. Шапиро. М.: Высшая школа, 2001. - 875 с.
58 Цветков А.В. Стимулирование в управлении проектами. М.: Апостроф, 2001. - 144 с.
59 Цвиркун А.Д., Акинфиев В.К., Соловьев М.М. Моделирование развития крупномасштабных систем.
М.: Наука, 1983.
60 Щепкин А.В. Механизмы внутрифирменного управления. М.: ИПУ РАН, 2001. - 80 с.
61 A guide to the project management body of knowledge (PMBOK® guide). 2000. - 215 p.
62 Fleming Q.W., Hoppelman J.M. Earned value Project Management. PMI, 1996. - 141 p.
63 Kerzner H. Project management: a systems approach to planning, scheduling and controlling. N.Y.
John Wiley Sons, 1998.
64 Kliem R.L., Ludin I.S. Project management practitioner’s book.
N.Y.: American Management Association, 1998.
65 Lientz B.P., Rea K.P. Project management for the 21-st century.
San Diego: Academic Press, 1998.
66 Mas-Collel A., Whinston M.D., Green J.R. Microeconomic theory.
N.Y.: Oxford Univ. Press, 1995. - 981 p.
67 Myerson R.B. Game theory: analysis of conflict.
London: Harvard Univ. Press, 1991. - 568 p.