
Множества реализуемых действий и минимальные затраты на стимулирование
Обозначим P1(s) и P2(s) - соответствующие множества реализуемых действий при одних и тех же ограничениях на стимулирование. Если некоторое действие y e A принадлежит множеству P1(s), то оно принадлежит и множеству P2(s), и наоборот, что следует непосредственно из определения (4) реализуемого действия - соответствующих систем неравенств, которые называются условиями согласования:
(12) y e A Sy*) - c(y*) Sy) - c(y)
и не изменяются от добавления к обеим частям константы (см. рисунок 2, на котором C - ограничение механизма стимулирования, y+(C) - правая граница множества P(C) реализуемых действий).
Несколько сложнее дело обстоит с условием индивидуальной рациональности. Если понимать под множеством реализуемых
действий (11), то (10) примет вид Po(S) = {yeA \ S(y) c(y)+U }. Понятно, что для того, чтобы изменение ограничения индивидуальной рациональности и вертикальный сдвиг затрат не изменяли множества P0, следует изменять используемую центром систему стимулирования следующим образом - добавлять к ней соответствующую константу (U и/или 8). Следует при этом иметь в виду, что при фиксированных ограничениях на функцию стимулирования увеличение, например, величины U может привести к сужению множества реализуемых действий (см. (11) и предположение А.3).
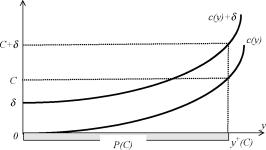
Рис. 2. Инвариантность множества реализуемых действий относительно сдвига функции затрат агента
Таким образом, справедливо следующее утверждение.
Утверждение 1. Все агенты, функции затрат и/или резервные зарплаты которых отличаются на одну и ту же величину, эквивалентны с точки зрения условий реализуемости при условии соответствующих изменений ограничения механизма стимулирования.
Итак, учет изменений индивидуального нуля полезности агента (сдвиг его затрат по вертикали) и учет изменений ограничений индивидуальной рациональности приводит к незначительным и легко учитываемым в каждом конкретном случае по аналогии с тем, как это делалось выше, модификациям основных характеристик задачи стимулирования (множеств реализуемых действий, ограничений на ФЗП и т.д.). Поэтому при дальнейшем изложении мы будем считать, что U = 0 и ограничиваться введенными выше предположениями, в рамках которых условие индивидуальной рациональности можно не учитывать.
Вернемся к анализу задачи синтеза оптимальной функции стимулирования.
Множества реализуемых действий и минимальные затраты на стимулирование
Тот факт, что реализуемыми являются те действия, которые как минимум обеспечивают агенту неотрицательную полезность, существенно упрощает анализ задачи стимулирования. Фиксируем произвольное действие агента y е A и рассмотрим следующую систему стимулирования:
с( У *), У = У * *
0, У * У
(1) едкіу*, У)
которая называется квазикомпенсаторной: QK-типа (иногда, в случаях, когда это не приведет к неоднозначности, зависимость от У в записи OqK будет опускаться).
Очевидно, что У е PA.Oq^*)). Если выполнено предположение А.3, то есть на абсолютные значения поощрений не наложено никаких ограничений, то действие У реализуемо системой стимулирования (1) (другими словами, в рамках А.3 реализуемо любое допустимое действие агента).
Если же выполнено предположение А.3', то должно выполняться: С о(у) с(у). Обозначим максимальное множество действий, реализуемых при заданных ограничениях:
(2) Р(С) = { у е A | с(У) ? С }. +
В рамках предположения А.3' выполнено: Р(С) = [С; у+(С)] (см. рисунок 2), где c(y ) = С. Если верно предположение А.3, то С = +? и Р(+ж) = A.
В [14, 71, 72] показано, что не существует системы стимулирования, удовлетворяющей А.3', и реализующей действия агента, не принадлежащие множеству (2). Приведем для полноты изложения доказательство этого факта.
Пусть существует OqK е M, удовлетворяющая А.3', и существует система стимулирования о1 е M, такая, что $y1 е Р(о1), для которого выполнено y1 у+. Тогда из условий согласования и определения у+ следует, что О1(у1) С, что противоречит предположению А.3'.
Так как в определении эффективности системы стимулирования максимум вычисляется по множеству реализуемых действий, то чем шире это множество, тем больше соответствующее максимальное значение. Следовательно, с расширением множества реализуемых действий увеличивается эффективность стимулирования.
Другими словами, если одна система стимулирования (точнее - класс систем стимулирования) имеет более широкое множество реализуемых действий, чем другая система стимулирования (другой класс систем стимулирования), то и эффективность первой системы стимулирования выше, чем второй. Значит максимальной эффективностью обладает класс систем стимулирования, имеющий максимальное множество реализуемых действий.
Из вышесказанного следует, что решение задачи стимулирования может быть разделено на два этапа. На первом этапе решается задача согласования - определяются множества реализуемых при заданных ограничениях действий.
На втором этапе решается задача оптимального согласованного планирования - ищется реализуемое действие, которое наиболее предпочтительно с точки зрения центра. Подобная идеология разбиения решения задачи управления ОС широко используется в теории активных систем [11, 14, 72] и в теории контрактов [11, 112, 127].
Из того, что система стимулирования QK-типа имеет максимальное множество реализуемых действий, следует, что она является решением задачи синтеза оптимальной функции стимулирования в прямой задаче стимулирования первого рода.
Отметим, что выражение (1) задает параметрический (параметр у*) класс систем стимулирования. Поэтому утверждения об оптимальности тех или иных систем стимулирования (классов систем стимулирования - в данном случае - квазикомпенсаторных) следует понимать следующим образом: существует значение параметра, при котором функция стимулирования из заданного класса имеет максимальную на множестве M эффективность (см. также [72]).
Зная, что оптимальную систему стимулирования следует искать в классе квазикомпенсаторных, а также то, что при использовании системы стимулирования OQK(y , у) агент выбирает действие, совпадающее с действием у , центр может забыть про условия согласования и решать задачу оптимального согласованного планирования [14], то есть искать реализуемое действие агента, максимизирующее доход или целевую функцию центра:
(3) Ф(у) ® max .
yzP(C)
В оптимальной (максимизирующей эффективность) квазикомпенсаторной системе стимулирования параметр у является решением задачи (3).
В задачах стимулирования первого рода оптимальными оказываются не только квазикомпенсаторные системы стимулирования, но и компенсаторные, скачкообразные и квазискачкообразные (см. их описание в разделе 1.3.) [14, 72].
Квазикомпенсаторные системы стимулирования реализуют действия с минимальными затратами на стимулирование: оттдк(у*) = Одк(у*, у*) = c(y*), то есть fy*) = 0, поэтому они же являются оптимальными в задачах стимулирования второго рода. Задача оптимального согласованного планирования в этом случае заключается в поиске реализуемого действия агента, максимизирующего разность между доходом центра и минимальными затратами на стимулирование (которые совпадают в рассматриваемой модели с затратами агента):
(4) H(y) - c(y) ® max .
у^P(C)
Если отсутствуют ограничения на размер вознаграждения агента (см. предположение А.3), то максимумы в (3) и (4) следует вычислять по всему множеству допустимых действий агента.
Содержательно, при использовании систем стимулирования QK-типа, как следует из их названия, центр в точности компенсирует затраты агента при выборе определенного действия, не выплачивая никакого вознаграждения при выборе агентом других действий. С этой точки зрения квазикомпенсаторные системы стимулирования согласованы с условием индивидуальной рациональности: при их использовании полезность агента равна нулю как минимум в двух точках - при выборе реализуемого действия и
нулевого действия, причем полезность агента нигде не принимает строго положительных значений.
Существенным плюсом квазикомпенсаторных систем стимулирования является их простота и высокая эффективность, существенным минусом - абсолютная неустойчивость относительно возможных возмущений параметров модели [25, 70]. Действительно, если центр неточно знает функцию затрат агента, то сколь угодно малая неточность может приводить к значительным изменениям реализуемых действий. Вопросы адекватности моделей стимулирования, устойчивости оптимальных решений и т.д. подробно исследовались в [70].
Предложенная в упомянутых работах техника анализа и методы повышения гарантированной (в рамках имеющейся у центра информации) эффективности стимулирования могут быть непосредственно использованы и для моделей, рассматриваемых ниже, поэтому проблемы адекватности и устойчивости в настоящей работе не исследуются.
Итак, выше описан подход к исследованию задачи стимулирования, использующий анализ свойств множеств реализуемых действий. Существует другой эквивалентный подход к изучению задач стимулирования. Выше определялось множество действий, реализуемых некоторой системой стимулирования, после чего вычислялся максимум целевой функции центра по этому множеству, а затем уже выбиралась система стимулирования.
При этом задача стимулирования распадается на два этапа: этап согласования и этап согласованного планирования. В явном виде эту последовательность можно выразить следующим образом: на первом этапе для каждой допустимой системы стимулирования вычисляются множества реализуемых действий, затем берется их объеди-
нение: PM = - P(s), после чего на втором этапе решается задача
а еМ
планирования - максимизации целевой функции центра на множестве Pm-
Умея решать прямую задачу стимулирования, достаточно просто найти и решение соответствующей обратной задачи. Например, выражение (2) позволяет определить минимальные ограничения на стимулирование, позволяющие реализовывать заданные действия. Взаимосвязь прямых и обратных задач стимулирования, а также задач стимулирования первого и второго рода подробно обсуждались в монографии [72].
Поэтому в настоящей работе мы в основном ограничимся прямыми задачами стимулирования второго рода, наиболее близкими к задачам теории контрактов, управления персоналом и т.д.
Интересно подчеркнуть, что выше мы, фактически, угадали оптимальное решение, не решая задачу в лоб. Существенную помощь при этом оказала идея введения множеств реализуемых действий.
Альтернативным подходом является анализ минимальных затрат на стимулирование, к описанию которого мы и переходим.
Если одно и то же действие может быть реализовано несколькими системами стимулирования, то, очевидно, что большей эффективностью обладает та из них, которая характеризуется меньшими затратами на стимулирование. Другими словами, оптимальным является класс систем стимулирования, реализующий любое действие агента с минимальными затратами центра на стимулирование. Это утверждение, несмотря на свою очевидность, дает универсальный инструмент решения задач стимулирования, который будет широко использоваться ниже.
Приведем корректное обоснование.
Минимальными затратами на стимулирование по реализации действия y е PM в классе допустимых систем стимулирования M называется следующая величина:
(^) smm(y) = min {s(y) | y е P(s)},
s eM
то есть минимальное допустимое вознаграждение, которое побудит агента выбрать заданное действие. Для тех действий, которые в рамках предположения А.2 не могут быть реализованы в классе M, положим минимальные затраты на стимулирование равными бесконечности:
(6) smin (У) =+". У e A \ Pm.
Очевидно, что в рамках предположения А.2 выполнено: У е PM Smin (У) = ФО.
Минимальные затраты на стимулирование являются чрезвычайно важным понятием. Их исследование позволяет решать задачу синтеза оптимальной функции стимулирования, изучать свойства оптимального решения и т.д.
Если для задачи стимулирования первого рода критерием сравнения эффективностей систем стимулирования служат максимальные множества реализуемых ими действий, то минимальные затраты на стимулирование являются таким критерием одновременно для задач и первого, и второго рода. Обоснуем это утверждение. Для этого обозначим максимальную в классе Mi с M эффективность управления Km. = max K(s), i = 1, 2.
1 s e Mi
Утверждение 2. Пусть M1 c M, M2 c M - два класса допустимых систем стимулирования и выполнено:
(7) y е A
s min 1 (y) smin 2 (y).
Тогда для задач стимулирования первого и второго рода Km1 KM2.
Доказательство. Обозначим Pi = - P(s), i = 1, 2, - макси-
s eMi
мальные множества действий, реализуемых соответствующими классами систем стимулирования. Пусть y е PM . Тогда, так как
выполнено V у е A smin1(y) smin2(y), то по определению минимальных затрат на стимулирование smin1 (у) +?, то есть у е Рм .
Другими словами, если выполнено условие утверждения, то в силу определения минимальных затрат на стимулирование имеет место Р2 с Р1, то есть системы стимулирования, характеризуемые меньшими затратами на стимулирование, реализуют большие множества действий, что доказывает справедливость утверждения для задач первого рода.
Доказать справедливость утверждения можно и не прибегая к явному анализу множеств реализуемых действий. Для этого рассмотрим задачу стимулирования первого рода. Обозначим
s2 = arg max { max H(y)}, y2 = arg max H(y).
s еM2 y е P(s) y е P(s2)
Тогда KM2 = H(y2) и существует s1 е M1 такое, что y2 е P(s1), следовательно, KM1 H(y2) = KM2.
Рассмотрим задачу стимулирования второго рода. Эффективность стимулирования может быть определена и через минимальные затраты на стимулирование, причем в силу (7) имеет место соотношение, доказывающее справедливость утверждения:
Km2 = max {H(y) - smm(y)} max {H(y) - smn,(y)} = KM1. -
yеA yеA
Отметим, что в условиях утверждения 2 (см. (7)) требуется, чтобы определенное соотношение между минимальными затратами на стимулирование выполнялось для любых допустимых действий агента. На первый взгляд может показаться, что это достаточно сильное условие, однако, как будет видно из дальнейшего изложения, это не так - анализ минимальных затрат на стимулирование является мощным инструментом исследования сравнительной эффективности различных систем стимулирования.
Итак, модель х исследуемой организационной системы задается перечислением следующих параметров: х = {A, M, H(-), с(-)}. Решение задачи стимулирование подразумевает нахождение
S = {s e M, y e A, KM}, где s - оптимальная система стимулирования, y - оптимальное реализуемое действие, KM - эффективность оптимальной системы стимулирования.
Если фиксировать все компоненты организационной системы, за исключением множества допустимых систем стимулирования, то, если выполнено (7), то задача сравнения эффективностей управлений в различных ОС (то есть эффективностей различных классов систем стимулирования) сведется к оценке величин:
(8) АЖМ1М2) = Kmi - Км2, A(Mi,M2) = SminMl(y*) - SmiriM2(y*), или
(9) A0(M1,M2) = KM1 /KM2, A(M1,M2) = SminM1(y ) / smirM2(У*), или
(10) AoMM) = (Kmi - KM2) / KM1,
A(M-bM-2) (sminM1(y ^ - SminM2(y / SminM1(y ^
Остановимся более подробно на обсуждении ограничений на стимулирование (и, следовательно, его эффективность), накладываемых предположениями А.3. и А.3' (очевидно, что выполнение А.3' является более сильным требованием, чем выполнение А.3). При определении минимальных затрат на стимулирование (5) мы положили затраты на стимулирование по реализации нереализуемых в рамках А.3' действий равными бесконечности.
В то же время, с точки зрения удобства для формального анализа, хотелось бы, чтобы минимальные затраты на стимулирование не зависели от абсолютных ограничений на величину индивидуального поощрения. Это вполне возможно сделать, вспомнив, что мы до сих пор не наложили никаких ограничений на функцию дохода центра.
Рассмотрим следующую задачу - пусть для некоторой ОС X выполнено предположение А.3. Тогда в ней реализуемыми являются любые действия агента, и минимальные затраты на стимулирование (5) могут обращаться в бесконечность лишь при бесконечных затратах агента.
Если в той же ОС на систему стимулирование наложено ограничение C, то минимальные затраты на стимулирование обратятся в бесконечность не только при бесконечных затратах агента, но и при его затратах, превышающих величину ограничения на стимулирование (см.(2)).
Этого можно избежать следующим образом: определим новую функцию дохода центра:
Обозначим х'а - организационную систему, отличающуюся от х функцией дохода центра (11). Если в ОС х выполнялось А.3', то в ОС х'а уже будет иметь место более слабое условие А.3. Легко видеть, что решения задач синтеза оптимальных функций стимулирования в обеих ОС совпадают, причем минимальные затраты на стимулирование в ОС х'а определяются уже более простым образом (ср. с (5)-(6)):
asM
(12) SminMy) = min {a(y) I y e P(a)},y e A.
Итак, справедлив следующий результат.
Утверждение 3. Решение задачи стимулирования в ОС с ограничением А.3' и минимальными затратами на стимулирование (5)-(6) эквивалентно решению задачи стимулирования в ОС с ограничением А.3 при условии (11) и затратами на стимулирование (12).
Замечая, что результат утверждения справедлив при любых целевых функциях центра, получаем следующее утверждение как комбинацию результатов двух предыдущих утверждений.
Утверждение 4. Пусть M1 с M, М2 с M - два подкласса допустимых систем стимулирования, для которых выполнено (7), где минимальные затраты на стимулирование определяются (12). Тогда К.М1 Е Км2.
Анализ задач стимулирования, проведенный выше (см. утверждения 1-4), показывает, что для того, чтобы установить сравнительную эффективность той или иной системы стимулирования (в прямых и обратных задачах первого и второго рода при практически любых комбинациях предположений о свойствах параметров ОС) достаточно проанализировать минимальные затраты на стимулирование (12) в рамках предположений А.1, А.2 и А.3. Все остальные расширения этой модели (наличие альтернативного уровня гарантированной полезности агента, его индивидуального нуля полезности, внешних ограничений на абсолютную величину стимулирования) либо непосредственно к ней сводятся (эквивалентны), либо требуют незначительных модификаций.
Пример 2. Приведем графическую интерпретацию описанного выше метода решения задач стимулирования второго рода. На рисунке 3 изображены графики функций: H(y) и (c(y) + U ); область действий, реализуемых с точки зрения как индивидуальной рациональности (s(y*) c(y ) + U ) и согласованности стимулирования (V у е A o(y*) - c(y*) o(y) - c(y)), так и с точки зрения неотрицательности целевой функции центра (не заключая контракт, центр всегда имеет возможность получить нулевую полезность, так как в рамках предположения А.4 H(0) = 0).
Множество действий агента и соответствующих значений целевых функций, удовлетворяющих одновременно всем перечисленным выше ограничениям (согласования, индивидуальной рациональности и др., как для центра так и для агента) - область компромисса заштрихована на рисунке 3.
Оптимальным реализуемым действием у является действие, максимизирующее в области компромисса разность между доходом центра и затратами агента. Легко видеть, что при неизменных функциях дохода и затрат с ростом величины U область компромисса вырождается.
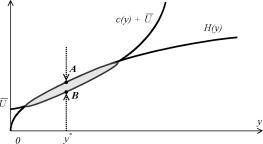
Рис. 3. Оптимальное решение детерминированной задачи стимулирования второго рода
Область компромисса является чрезвычайно важным с методологической точки зрения понятием. Ее непустота отражает наличие возможности согласования интересов центра и агента в существующих условиях.
Поясним последнее утверждение.
В формальной модели стратегии участников ограничены соответствующими допустимыми множествами. Учет ограничений индивидуальной рациональности агента (условно можно считать, что параметр резервной зарплаты U , фигурирующий в условии участия, отражает ограничения рынка труда) и центра (условно можно считать, что неотрицательность целевой функции центра отражает ограничения финансовой эффективности деятельности центра - затраты на стимулирование агента не должны превышать доход от результатов его деятельности), а также условий согласования, приводит к тому, что множество рациональных стратегий - область компромисса - оказывается достаточно узкой.
Фактически, компромисс между центром и агентом заключается в дележе полезности, равной разности полезностей в точках А и В на рисунке 3. Делая первый ход (предлагая контракт), центр забирает эту разность себе, вынуждая агента согласиться с резервным значением полезности. Легко проверить, что в противоположной ситуации, когда первый ход делает агент, предлагая контракт центру, нулевую полезность получает центр, а агент забирает разность полезности между точками А и В себе [25, 49].
Условие оптимальности в рассматриваемой модели (в предположении дифференцируемости функций дохода и затрат, а также вогнутости функции дохода центра и выпуклости функции затрат
ч dH (у *) dc( у *) „ dH (y)
агента) имеет вид: -= -. Величина- в экономике
dy dy dy
называется предельной производительностью агента (MRP), а
d ( *)
величина - - его предельными затратами (MC). Условие
dy
оптимума (MRP = MC) - определяет так называемую эффективную заработную плату. -
Как следует из сказанного выше, в рамках введенных предположений система стимулирования QK-типа является оптимальным
решением задач стимулирования первого и второго рода. Казалось бы, что можно еще вытянуть из этой задачи?
Все дело в том, что мы считали, что квазикомпенсаторная система является допустимой (см. предположения А.3 и А.3’). Однако, на практике это не всегда так - центр может быть жестко ограничен некоторым фиксированным классом систем стимулирования, причем эти ограничения могут быть как экзогенными - например, определяться правовыми нормами, регулирующими оплату труда, так и эндогенными - по тем или иным причинам центр может быть склонен к использованию, например, сдельной или повременной оплаты, а не к простой компенсации затрат.
Поэтому одна из задач настоящего исследования заключается в том, чтобы оценить сравнительную эффективность различных базовых систем стимулирования. Базовыми мы будем называть простейшие, и в тоже время широко распространенные на практике, системы стимулирования, подробно рассматриваемые в последующих разделах настоящей работы.
Приводимое ниже описание результатов исследования базовых систем стимулирования выполнено в рамках следующего общего подхода: для фиксированного класса систем стимулирования определяются минимальные затраты на стимулирование, затем сравниваются затраты на стимулирование для различных классов. Априори можно сказать, что так как идеалом являются абсолютно оптимальные квазикомпенсаторные системы стимулирования, то эффективность любой системы стимулирования будет не выше (а затраты на стимулирование, соответственно, не ниже), чем у систем QK-типа. Однако, важно не только качественное соотношение эффективностей, так как ключевым является вопрос именно о количественных потерях в эффективности (приросте в минимальных суммарных затратах на стимулирование) - только зная
величину этих потерь управляющий орган может принимать решение о целесообразности использования конкретной системы стимулирования [16, 72]. Так, например, использование унифицированных (одинаковых для всех агентов многоэлементной ОС) систем стимулирования уменьшает информационную нагрузку на центр, но и приводит к снижению эффективности самого стимулирования.
Решение о разумности компромисса между выигрышем в информационной нагрузке и потерями в эффективности требует, как минимум, оценки этих величин.
Основным инструментом оценки потерь в эффективности в настоящем исследовании являются приведенные выше результаты о соотношении эффективности и минимальных затрат на стимулирование, поэтому достаточным оказывается вычисление разности или отношения показателей эффективности или соответствующих затрат на стимулирование.
Закончив вводную часть, в которой описан и развит инструментарий для дальнейшего исследования, перейдем к перечислению и исследованию собственно базовых систем стимулирования.